





ເຄື່ອງທົດສອບວັດສະດຸທົ່ວໄປ YY–UTM-01A
ເຄື່ອງນີ້ໃຊ້ສຳລັບໂລຫະ ແລະ ບໍ່ແມ່ນໂລຫະ (ລວມທັງວັດສະດຸປະສົມ) ທີ່ມີແຮງດຶງ, ການບີບອັດ, ການບິດ, ການຕັດ, ການປອກເປືອກ, ການຈີກຂາດ, ການໂຫຼດ, ການຜ່ອນຄາຍ, ການຕອບໂຕ້ ແລະ ລາຍການອື່ນໆຂອງການຄົ້ນຄວ້າການວິເຄາະການທົດສອບປະສິດທິພາບຄົງທີ່, ສາມາດໄດ້ຮັບ REH, Rel, RP0.2, FM, RT0.5, RT0.6, RT0.65, RT0.7, RM, E ແລະ ພາລາມິເຕີການທົດສອບອື່ນໆໂດຍອັດຕະໂນມັດ. ແລະ ອີງຕາມມາດຕະຖານ GB, ISO, DIN, ASTM, JIS ແລະ ມາດຕະຖານພາຍໃນ ແລະ ສາກົນອື່ນໆ ສຳລັບການທົດສອບ ແລະ ສະໜອງຂໍ້ມູນ.
(1) ພາລາມິເຕີການວັດແທກ
1. ແຮງທົດສອບສູງສຸດ: 10kN, 30kN, 50kN, 100kN
(ສາມາດເພີ່ມເຊັນເຊີເພີ່ມເຕີມເພື່ອຂະຫຍາຍຂອບເຂດການວັດແທກແຮງໄດ້)
2. ລະດັບຄວາມຖືກຕ້ອງ: 0.5 ລະດັບ
3. ຂອບເຂດການວັດແທກແຮງທົດສອບ: 0.4% ~ 100%FS (ຂະໜາດເຕັມ)
4. ແຮງທົດສອບຊີ້ບອກຄ່າຜິດພາດ: ຄ່າທີ່ລະບຸໄວ້ພາຍໃນ ±0.5%
5. ຄວາມລະອຽດຂອງແຮງທົດສອບ: ແຮງທົດສອບສູງສຸດ ±1/300000
ຂະບວນການທັງໝົດບໍ່ໄດ້ຈັດປະເພດ, ແລະ ຄວາມລະອຽດທັງໝົດກໍ່ບໍ່ປ່ຽນແປງ.
6. ຂອບເຂດການວັດແທກການຜິດຮູບ: 0.2% ~ 100%FS
7. ຄ່າຄວາມຜິດພາດຂອງການຜິດຮູບ: ສະແດງຄ່າພາຍໃນ ±0.5%
8. ຄວາມລະອຽດການຜິດຮູບ: 1/200000 ຂອງການຜິດຮູບສູງສຸດ
ສູງສຸດ 1 ໃນ 300,000
9. ຄວາມຜິດພາດໃນການຍ້າຍບ່ອນ: ພາຍໃນ ±0.5% ຂອງຄ່າທີ່ສະແດງ
10. ຄວາມລະອຽດການຍ້າຍຖິ່ນຖານ: 0.025μm
(2) ພາລາມິເຕີການຄວບຄຸມ
1. ຂອບເຂດການປັບອັດຕາການຄວບຄຸມແຮງ: 0.005 ~ 5%FS/S
2. ຄວາມແມ່ນຍໍາຂອງການຄວບຄຸມອັດຕາການບັງຄັບ:
ອັດຕາ < 0.05%FS/s, ພາຍໃນ ±2% ຂອງຄ່າທີ່ຕັ້ງໄວ້,
ອັດຕາ ≥0.05%FS/S, ພາຍໃນ ±0.5% ຂອງຄ່າທີ່ຕັ້ງໄວ້;
3. ຂອບເຂດການປັບອັດຕາການຜິດຮູບ: 0.005 ~ 5%FS/S
4. ຄວາມແມ່ນຍໍາຂອງການຄວບຄຸມອັດຕາການຜິດຮູບ:
ອັດຕາ < 0.05%FS/s, ພາຍໃນ ±2% ຂອງຄ່າທີ່ຕັ້ງໄວ້,
ອັດຕາ ≥0.05%FS/S, ພາຍໃນ ±0.5% ຂອງຄ່າທີ່ຕັ້ງໄວ້;
5. ຂອບເຂດການປັບອັດຕາການຍ້າຍຖິ່ນຖານ: 0.001 ~ 500 ມມ/ນາທີ
6. ຄວາມແມ່ນຍໍາຂອງການຄວບຄຸມອັດຕາການຍ້າຍຖິ່ນຖານ:
ເມື່ອຄວາມໄວໜ້ອຍກວ່າ 0.5 ມມ/ນາທີ, ພາຍໃນ ±1% ຂອງຄ່າທີ່ຕັ້ງໄວ້,
ເມື່ອຄວາມໄວ ≥0.5 ມມ/ນາທີ, ພາຍໃນ ±0.2% ຂອງຄ່າທີ່ຕັ້ງໄວ້.
(3) ພາລາມິເຕີອື່ນໆ
1. ຄວາມກວ້າງຂອງການທົດສອບທີ່ມີປະສິດທິພາບ: 440 ມມ
2. ຈັງຫວະການຍືດທີ່ມີປະສິດທິພາບ: 610 ມມ (ລວມທັງອຸປະກອນຍືດຮູບລີ່ມ, ສາມາດປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການຂອງຜູ້ໃຊ້)
3. ການເຄື່ອນໄຫວຂອງລຳແສງ: 970 ມມ
4. ຂະໜາດຫຼັກ (ຍາວ × ກວ້າງ × ສູງ) :(820 × 620 × 1880) ມມ
5. ນ້ຳໜັກເຄື່ອງ: ປະມານ 350 ກິໂລ
6. ການສະຫນອງພະລັງງານ: 220V, 50HZ, 1KW
(1) ໂຄງສ້າງຂະບວນການກົນຈັກ:
ໂຄງຫຼັກສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍພື້ນຖານ, ຄານຄົງທີ່ສອງອັນ, ຄານເຄື່ອນທີ່ໜຶ່ງອັນ, ເສົາສີ່ອັນ ແລະ ໂຄງສ້າງໂຄງ gantry ສອງອັນ; ລະບົບສົ່ງກຳລັງ ແລະ ການໂຫຼດໃຊ້ມໍເຕີ servo AC ແລະ ອຸປະກອນຫຼຸດເກຍ synchronous, ເຊິ່ງຂັບເຄື່ອນສະກູບານທີ່ມີຄວາມແມ່ນຍໍາສູງໃຫ້ໝຸນ, ແລະຫຼັງຈາກນັ້ນຂັບເຄື່ອນຄານເຄື່ອນທີ່ເພື່ອຮັບຮູ້ການໂຫຼດ. ເຄື່ອງຈັກມີຮູບຮ່າງທີ່ສວຍງາມ, ສະຖຽນລະພາບດີ, ຄວາມແຂງແກ່ນສູງ, ຄວາມແມ່ນຍໍາໃນການຄວບຄຸມສູງ, ປະສິດທິພາບໃນການເຮັດວຽກສູງ, ສຽງດັງຕ່ຳ, ປະຫຍັດພະລັງງານ ແລະ ປົກປ້ອງສິ່ງແວດລ້ອມ.
ລະບົບການຄວບຄຸມ ແລະ ການວັດແທກ:
ເຄື່ອງນີ້ໃຊ້ລະບົບຄວບຄຸມວົງຈອນປິດດິຈິຕອນຄົບວົງຈອນ DSC-10 ທີ່ທັນສະໄໝສຳລັບການຄວບຄຸມ ແລະ ການວັດແທກ, ໂດຍໃຊ້ຄອມພິວເຕີເພື່ອທົດສອບຂະບວນການ ແລະ ທົດສອບການສະແດງຜົນແບບໄດນາມິກຂອງເສັ້ນໂຄ້ງ, ແລະ ການປະມວນຜົນຂໍ້ມູນ. ຫຼັງຈາກສິ້ນສຸດການທົດສອບ, ເສັ້ນໂຄ້ງສາມາດຂະຫຍາຍໄດ້ຜ່ານໂມດູນປະມວນຜົນກຣາບຟິກສຳລັບການວິເຄາະຂໍ້ມູນ ແລະ ການແກ້ໄຂ, ປະສິດທິພາບບັນລຸລະດັບທີ່ກ້າວໜ້າລະດັບສາກົນ.
1.Rຮັບຮູ້ການຍົກຍ້າຍ, ການຜິດຮູບ, ການຄວບຄຸມຄວາມໄວໃນວົງຈອນປິດພິເສດ.ໃນລະຫວ່າງການທົດສອບ, ຄວາມໄວໃນການທົດສອບ ແລະ ວິທີການທົດສອບສາມາດປ່ຽນແປງໄດ້ຢ່າງຍືດຫຍຸ່ນເພື່ອເຮັດໃຫ້ໂຄງການທົດສອບມີຄວາມຍືດຫຍຸ່ນ ແລະ ໜັກແໜ້ນຫຼາຍຂຶ້ນ;
2. ການປົກປ້ອງຫຼາຍຊັ້ນ: ດ້ວຍຊອບແວ ແລະ ຮາດແວ ໜ້າທີ່ການປົກປ້ອງສອງລະດັບ, ສາມາດບັນລຸການທົດສອບເຄື່ອງຈັກໂຫຼດເກີນ, ກະແສເກີນ, ແຮງດັນເກີນ, ແຮງດັນຕ່ຳ, ຄວາມໄວ, ຂີດຈຳກັດ ແລະ ວິທີການປ້ອງກັນຄວາມປອດໄພອື່ນໆ;
3. ຊ່ອງທາງການແປງ A/D 24 ບິດຄວາມໄວສູງ, ຄວາມລະອຽດຂອງລະຫັດທີ່ມີປະສິດທິພາບສູງເຖິງ ± 1/300000, ເພື່ອໃຫ້ບັນລຸການບໍ່ຈັດປະເພດພາຍໃນ ແລະ ພາຍນອກ, ແລະ ຄວາມລະອຽດທັງໝົດບໍ່ປ່ຽນແປງ;
4. ການສື່ສານຜ່ານ USB ຫຼື serial, ການສົ່ງຂໍ້ມູນມີຄວາມໝັ້ນຄົງ ແລະ ໜ້າເຊື່ອຖື, ມີຄວາມສາມາດໃນການຕ້ານການແຊກແຊງທີ່ເຂັ້ມແຂງ;
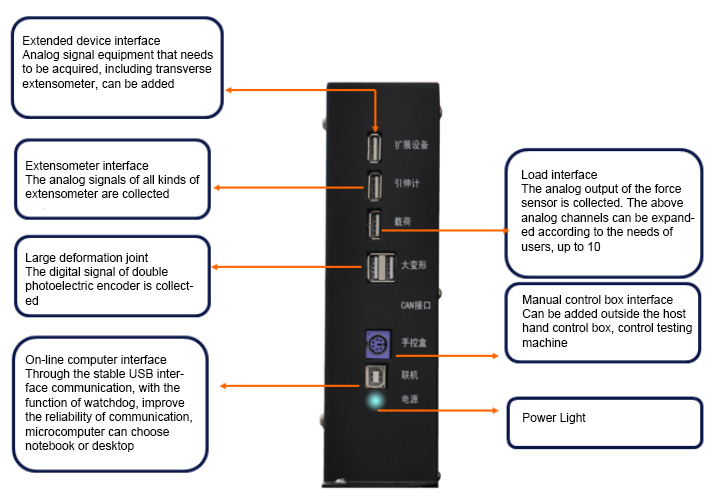
5. ຮັບຮອງເອົາຊ່ອງທາງການຈັບສັນຍານກຳມະຈອນ 3 ຊ່ອງ (ສັນຍານກຳມະຈອນ 3 ຊ່ອງຄື ສັນຍານການຍ້າຍ 1 ຊ່ອງ ແລະ ສັນຍານການຜິດຮູບຂະໜາດໃຫຍ່ 2 ຊ່ອງຕາມລຳດັບ), ແລະ ຮັບຮອງເອົາເທັກໂນໂລຢີຄວາມຖີ່ສີ່ເທົ່າທີ່ທັນສະໄໝທີ່ສຸດເພື່ອຂະຫຍາຍຈຳນວນກຳມະຈອນທີ່ມີປະສິດທິພາບຂຶ້ນສີ່ເທົ່າ, ເຊິ່ງປັບປຸງຄວາມລະອຽດຂອງສັນຍານໄດ້ຢ່າງຫຼວງຫຼາຍ, ແລະ ຄວາມຖີ່ການຈັບສູງສຸດແມ່ນ 5MHz;
6. ສັນຍານຂັບເຄື່ອນດິຈິຕອນມໍເຕີ servo ທາງດຽວ, ຄວາມຖີ່ສູງສຸດຂອງຜົນຜະລິດ PWM ແມ່ນ 5MHz, ຕໍ່າສຸດແມ່ນ 0.01Hz.
1. ລະບົບຄວບຄຸມວົງຈອນປິດດິຈິຕອນທັງໝົດ DSC-10
ລະບົບຄວບຄຸມວົງຈອນປິດດິຈິຕອນເຕັມຮູບແບບ DSC-10 ແມ່ນລະບົບຄວບຄຸມແບບມືອາຊີບລຸ້ນໃໝ່ຂອງເຄື່ອງທົດສອບທີ່ພັດທະນາໂດຍບໍລິສັດຂອງພວກເຮົາ. ມັນໃຊ້ຊິບຄວບຄຸມແບບມືອາຊີບທີ່ທັນສະໄໝທີ່ສຸດຂອງມໍເຕີ servo ແລະໂມດູນການເກັບກຳ ແລະ ປະມວນຜົນຂໍ້ມູນຫຼາຍຊ່ອງທາງ, ເຊິ່ງຮັບປະກັນຄວາມສອດຄ່ອງຂອງການເກັບຕົວຢ່າງລະບົບ ແລະ ຄວາມໄວສູງ ແລະ ໜ້າທີ່ຄວບຄຸມທີ່ມີປະສິດທິພາບ, ແລະ ຮັບປະກັນຄວາມກ້າວໜ້າຂອງລະບົບ. ການອອກແບບລະບົບພະຍາຍາມໃຊ້ໂມດູນຮາດແວເພື່ອຮັບປະກັນຄວາມໝັ້ນຄົງ ແລະ ຄວາມໜ້າເຊື່ອຖືຂອງຜະລິດຕະພັນ.
2. ແພລດຟອມຄວບຄຸມທີ່ມີປະສິດທິພາບ ແລະ ເປັນມືອາຊີບ
DSC ແມ່ນອຸທິດໃຫ້ກັບ IC ຄວບຄຸມອັດຕະໂນມັດ, ພາຍໃນແມ່ນການລວມກັນຂອງ DSP + MCU. ມັນປະສົມປະສານຂໍ້ໄດ້ປຽບຂອງຄວາມໄວໃນການດຳເນີນງານທີ່ໄວຂອງ DSP ແລະຄວາມສາມາດທີ່ເຂັ້ມແຂງຂອງ MCU ໃນການຄວບຄຸມພອດ I/O, ແລະປະສິດທິພາບໂດຍລວມຂອງມັນແມ່ນດີກ່ວາ DSP ຫຼື MCU 32-ບິດຢ່າງຈະແຈ້ງ. ການເຊື່ອມໂຍງພາຍໃນຂອງໂມດູນການຄວບຄຸມມໍເຕີຮາດແວທີ່ຕ້ອງການ, ເຊັ່ນ: PWM, QEI, ແລະອື່ນໆ. ປະສິດທິພາບຫຼັກຂອງລະບົບແມ່ນຮັບປະກັນຢ່າງສົມບູນໂດຍໂມດູນຮາດແວ, ເຊິ່ງຮັບປະກັນການເຮັດວຽກທີ່ປອດໄພແລະໝັ້ນຄົງຂອງລະບົບ.
3. ຮູບແບບການເກັບຕົວຢ່າງແບບຂະໜານໂດຍອີງໃສ່ຮາດແວ
ຈຸດເດັ່ນອີກອັນໜຶ່ງຂອງລະບົບນີ້ແມ່ນການນຳໃຊ້ຊິບ ASIC ພິເສດ. ໂດຍການໃຊ້ຊິບ ASIC, ສັນຍານຂອງແຕ່ລະເຊັນເຊີຂອງເຄື່ອງທົດສອບສາມາດເກັບກຳໄດ້ພ້ອມໆກັນ, ເຊິ່ງເຮັດໃຫ້ພວກເຮົາເປັນບໍລິສັດທຳອິດໃນປະເທດຈີນທີ່ຮັບຮູ້ຮູບແບບການເກັບຕົວຢ່າງແບບຂະໜານທີ່ອີງໃສ່ຮາດແວທີ່ແທ້ຈິງ, ແລະ ຫຼີກລ່ຽງບັນຫາການປະສານກັນຂອງການໂຫຼດ ແລະ ການຜິດຮູບທີ່ເກີດຈາກການເກັບຕົວຢ່າງແບບແບ່ງປັນເວລາຂອງແຕ່ລະຊ່ອງເຊັນເຊີໃນອະດີດ.
4. ໜ້າທີ່ການກັ່ນຕອງຮາດແວຂອງສັນຍານກຳມະຈອນຕຳແໜ່ງ
ໂມດູນການຮັບຕຳແໜ່ງຂອງຕົວເຂົ້າລະຫັດແສງໄຟຟ້າຮັບຮອງເອົາໂມດູນຮາດແວພິເສດ, ຕົວກອງ 24 ລະດັບໃນຕົວ, ເຊິ່ງປະຕິບັດການກັ່ນຕອງພາດສະຕິກໃສ່ສັນຍານກຳມະຈອນທີ່ໄດ້ຮັບ, ຫຼີກລ່ຽງການນັບຄວາມຜິດພາດທີ່ເກີດຈາກການເກີດຂຶ້ນຂອງກຳມະຈອນແຊກແຊງໃນລະບົບການຮັບກຳມະຈອນຕຳແໜ່ງ, ແລະຮັບປະກັນຄວາມຖືກຕ້ອງຂອງຕຳແໜ່ງໄດ້ຢ່າງມີປະສິດທິພາບຫຼາຍຂຶ້ນ, ເພື່ອໃຫ້ລະບົບການຮັບກຳມະຈອນຕຳແໜ່ງສາມາດເຮັດວຽກໄດ້ຢ່າງໝັ້ນຄົງ ແລະ ໜ້າເຊື່ອຖື.
5. Cຄວບຄຸມການປະຕິບັດພື້ນຖານຂອງໜ້າທີ່
ຊິບ ASIC ທີ່ອຸທິດຕົນແບ່ງປັນວຽກງານການເກັບຕົວຢ່າງ, ການຕິດຕາມສະພາບ ແລະ ຊຸດຂອງອຸປະກອນຕໍ່ພ່ວງ, ແລະ ການສື່ສານ ແລະ ວຽກງານທີ່ກ່ຽວຂ້ອງອື່ນໆຈາກໂມດູນຮາດແວພາຍໃນເພື່ອໃຫ້ຮັບຮູ້, ດັ່ງນັ້ນ DSC ສາມາດສຸມໃສ່ວຽກງານການຄິດໄລ່ PID ທີ່ຄວບຄຸມໄດ້ຫຼາຍຂຶ້ນເຊັ່ນ: ຕົວຫຼັກ, ບໍ່ພຽງແຕ່ມີຄວາມໜ້າເຊື່ອຖືຫຼາຍຂຶ້ນ, ແລະ ຄວາມໄວໃນການຕອບສະໜອງການຄວບຄຸມໄວຂຶ້ນ, ເຊິ່ງເຮັດໃຫ້ລະບົບຂອງພວກເຮົາໂດຍການດຳເນີນງານດ້ານລຸ່ມຂອງແຜງຄວບຄຸມເຮັດໃຫ້ການປັບ PID ແລະ ຜົນຜະລິດການຄວບຄຸມສຳເລັດ, ການຄວບຄຸມວົງຈອນປິດແມ່ນຮັບຮູ້ຢູ່ທາງລຸ່ມຂອງລະບົບ.
ອິນເຕີເຟດຜູ້ໃຊ້ຮອງຮັບລະບົບ Windows, ການສະແດງຜົນ ແລະ ການປະມວນຜົນແບບເສັ້ນໂຄ້ງແບບເວລາຈິງ, ຮູບພາບ, ໂຄງສ້າງຊອບແວແບບໂມດູນ, ການເກັບຮັກສາຂໍ້ມູນ ແລະ ການປະມວນຜົນໂດຍອີງໃສ່ຖານຂໍ້ມູນ MS-ACCESS, ງ່າຍຕໍ່ການເຊື່ອມຕໍ່ກັບຊອບແວ OFFICE.
1. ຮູບແບບການຈັດການສິດທິຂອງຜູ້ໃຊ້ແບບລຳດັບຊັ້ນ:
ຫຼັງຈາກຜູ້ໃຊ້ເຂົ້າສູ່ລະບົບແລ້ວ, ລະບົບຈະເປີດໂມດູນໜ້າທີ່ການດຳເນີນງານທີ່ສອດຄ້ອງກັນຕາມສິດອຳນາດຂອງມັນ. ຜູ້ເບິ່ງແຍງລະບົບຊັ້ນສູງມີສິດອຳນາດສູງສຸດ, ສາມາດປະຕິບັດການຄຸ້ມຄອງສິດອຳນາດຂອງຜູ້ໃຊ້, ໃຫ້ຜູ້ປະຕິບັດງານທີ່ແຕກຕ່າງກັນອະນຸຍາດໂມດູນການດຳເນີນງານທີ່ແຕກຕ່າງກັນ.
2. Hໃນຖານະເປັນໜ້າທີ່ການຄຸ້ມຄອງການທົດສອບທີ່ມີປະສິດທິພາບ, ໜ່ວຍການທົດສອບສາມາດຕັ້ງຄ່າໄດ້ຕາມຄວາມຕ້ອງການຂອງທຸກຄົນ.
ອີງຕາມມາດຕະຖານທີ່ແຕກຕ່າງກັນ, ສາມາດແກ້ໄຂໄດ້ຕາມແບບແຜນການທົດສອບທີ່ສອດຄ້ອງກັນ, ຕາບໃດທີ່ເລືອກແບບແຜນການທົດສອບທີ່ສອດຄ້ອງກັນໃນລະຫວ່າງການທົດສອບ, ທ່ານສາມາດເຮັດສຳເລັດການທົດສອບຕາມຄວາມຕ້ອງການມາດຕະຖານ, ແລະສະແດງລາຍງານການທົດສອບທີ່ຕອບສະໜອງຄວາມຕ້ອງການມາດຕະຖານ. ຂະບວນການທົດສອບ ແລະ ສະຖານະອຸປະກອນສະແດງຜົນໃນເວລາຈິງ, ເຊັ່ນ: ສະຖານະການແລ່ນອຸປະກອນ, ຂັ້ນຕອນການຄວບຄຸມໂປຣແກຣມ, ວ່າສະວິດເຄື່ອງວັດແທກຄວາມຍືດໄດ້ສຳເລັດແລ້ວຫຼືບໍ່, ແລະອື່ນໆ.
3. ຟັງຊັນການວິເຄາະເສັ້ນໂຄ້ງທີ່ມີປະສິດທິພາບ
ສາມາດເລືອກເສັ້ນໂຄ້ງຫຼາຍເສັ້ນເຊັ່ນ: ການຜິດຮູບການໂຫຼດ ແລະ ເວລາໂຫຼດເພື່ອສະແດງເສັ້ນໂຄ້ງໜຶ່ງ ຫຼື ຫຼາຍເສັ້ນໃນເວລາຈິງ. ຕົວຢ່າງໃນການຊ້ອນກັນຂອງເສັ້ນໂຄ້ງກຸ່ມດຽວກັນສາມາດໃຊ້ຄວາມຄົມຊັດຂອງສີທີ່ແຕກຕ່າງກັນ, ເສັ້ນໂຄ້ງການຂ້າມ ແລະ ເສັ້ນໂຄ້ງການທົດສອບສາມາດວິເຄາະການຂະຫຍາຍທ້ອງຖິ່ນໄດ້ຕາມໃຈມັກ, ແລະ ຮອງຮັບການສະແດງຢູ່ເທິງເສັ້ນໂຄ້ງການທົດສອບ ແລະ ການຕິດສະຫຼາກຈຸດຄຸນສົມບັດແຕ່ລະຈຸດ, ສາມາດເຮັດໂດຍອັດຕະໂນມັດ ຫຼື ດ້ວຍຕົນເອງຢູ່ເທິງເສັ້ນໂຄ້ງໂດຍການວິເຄາະປຽບທຽບ, ການໝາຍຈຸດຄຸນສົມບັດຂອງເສັ້ນໂຄ້ງຍັງສາມາດພິມໃນບົດລາຍງານການທົດສອບໄດ້.
4. ການເກັບຮັກສາຂໍ້ມູນການທົດສອບໂດຍອັດຕະໂນມັດເພື່ອຫຼີກເວັ້ນການສູນເສຍຂໍ້ມູນການທົດສອບທີ່ເກີດຈາກອຸບັດຕິເຫດ.
ມັນມີໜ້າທີ່ຄົ້ນຫາຂໍ້ມູນການທົດສອບແບບບໍ່ຊັດເຈນ, ເຊິ່ງສາມາດຄົ້ນຫາຂໍ້ມູນການທົດສອບທີ່ສຳເລັດແລ້ວ ແລະ ຜົນໄດ້ຮັບຢ່າງວ່ອງໄວຕາມເງື່ອນໄຂທີ່ແຕກຕ່າງກັນ, ເພື່ອໃຫ້ໄດ້ຜົນການທົດສອບທີ່ປາກົດຂຶ້ນອີກຄັ້ງ. ມັນຍັງສາມາດເປີດຂໍ້ມູນຂອງໂຄງການທົດສອບດຽວກັນທີ່ດຳເນີນໃນເວລາ ຫຼື ກຸ່ມທີ່ແຕກຕ່າງກັນເພື່ອການວິເຄາະປຽບທຽບ. ໜ້າທີ່ສຳຮອງຂໍ້ມູນຍັງສາມາດບັນທຶກ ແລະ ເບິ່ງຂໍ້ມູນທີ່ເກັບໄວ້ກ່ອນໜ້ານີ້ໄດ້ແຍກຕ່າງຫາກ.
5. ຮູບແບບການເກັບຮັກສາຖານຂໍ້ມູນ MS-Access ແລະຄວາມສາມາດໃນການຂະຫຍາຍຊອບແວ
ຫຼັກຂອງຊອບແວ DSC-10LG ແມ່ນອີງໃສ່ຖານຂໍ້ມູນ MS-Access, ເຊິ່ງສາມາດເຊື່ອມຕໍ່ກັບຊອບແວ Office ແລະເກັບຮັກສາລາຍງານໃນຮູບແບບ Word ຫຼື Excel. ນອກຈາກນັ້ນ, ຂໍ້ມູນຕົ້ນສະບັບສາມາດເປີດໄດ້, ຜູ້ໃຊ້ສາມາດຊອກຫາຂໍ້ມູນຕົ້ນສະບັບຜ່ານຖານຂໍ້ມູນ, ອຳນວຍຄວາມສະດວກໃນການຄົ້ນຄວ້າວັດສະດຸ, ແລະໃຫ້ປະສິດທິພາບຂອງຂໍ້ມູນການວັດແທກຢ່າງເຕັມທີ່.
6. ດ້ວຍເຄື່ອງວັດແທກຂະຫຍາຍສາມາດໄດ້ຮັບ REH, REL, RP0.2, FM, RT0.5, RT0.6, RT0.65, RT0.7, RM, E ແລະພາລາມິເຕີການທົດສອບອື່ນໆໂດຍອັດຕະໂນມັດ, ພາລາມິເຕີສາມາດຕັ້ງຄ່າໄດ້ຢ່າງອິດສະຫຼະ, ແລະສາມາດພິມກຣາຟໄດ້.
7. Cຈະຖືກຕັ້ງຄ່າຫຼັງຈາກຜົນຜະລິດເພື່ອລຶບຟັງຊັນເຄື່ອງວັດແທກຄວາມຍືດ
ຊອບແວ DSC-10LG ຈະກຳນົດໂດຍອັດຕະໂນມັດວ່າການຜິດຮູບໄດ້ຖືກປ່ຽນໄປເປັນການລວບລວມການຍ້າຍຫຼັງຈາກຜົນຜະລິດຕົວຢ່າງສິ້ນສຸດລົງ, ແລະເຕືອນຜູ້ໃຊ້ໃນແຖບຂໍ້ມູນວ່າ "ການຜິດຮູບສິ້ນສຸດລົງ, ແລະເຄື່ອງວັດແທກການຍືດສາມາດຖອດອອກໄດ້".
8. Aການກັບຄືນອັດຕະໂນມັດ: ລຳແສງທີ່ເຄື່ອນທີ່ສາມາດກັບຄືນສູ່ຕຳແໜ່ງເລີ່ມຕົ້ນຂອງການທົດສອບໂດຍອັດຕະໂນມັດ.
9. Aການປັບທຽບອັດຕະໂນມັດ: ການໂຫຼດ, ການຍືດຕົວສາມາດຖືກປັບທຽບໂດຍອັດຕະໂນມັດຕາມຄ່າມາດຕະຖານທີ່ເພີ່ມເຂົ້າມາ.
10. Rໂໝດ ange: ລະດັບເຕັມບໍ່ໄດ້ຈັດປະເພດ
(1) ໜ່ວຍໂມດູນ: ອຸປະກອນເສີມຫຼາກຫຼາຍຊະນິດທີ່ສາມາດແລກປ່ຽນກັນໄດ້, ຮາດແວໄຟຟ້າແບບໂມດູນເພື່ອຄວາມສະດວກໃນການຂະຫຍາຍໜ້າທີ່ ແລະ ການບຳລຸງຮັກສາ;
(2) ການສະຫຼັບອັດຕະໂນມັດ: ເສັ້ນໂຄ້ງການທົດສອບຕາມແຮງທົດສອບ ແລະ ການຜິດຮູບຂອງຂະໜາດຂອງຂອບເຂດການຫັນປ່ຽນອັດຕະໂນມັດ.





